U članku su pojašnjene grupe simetrija Platonovih tijela: tetraedra, heksaedra, oktaedra, dodekaedra i ikosaedra.
Uvod
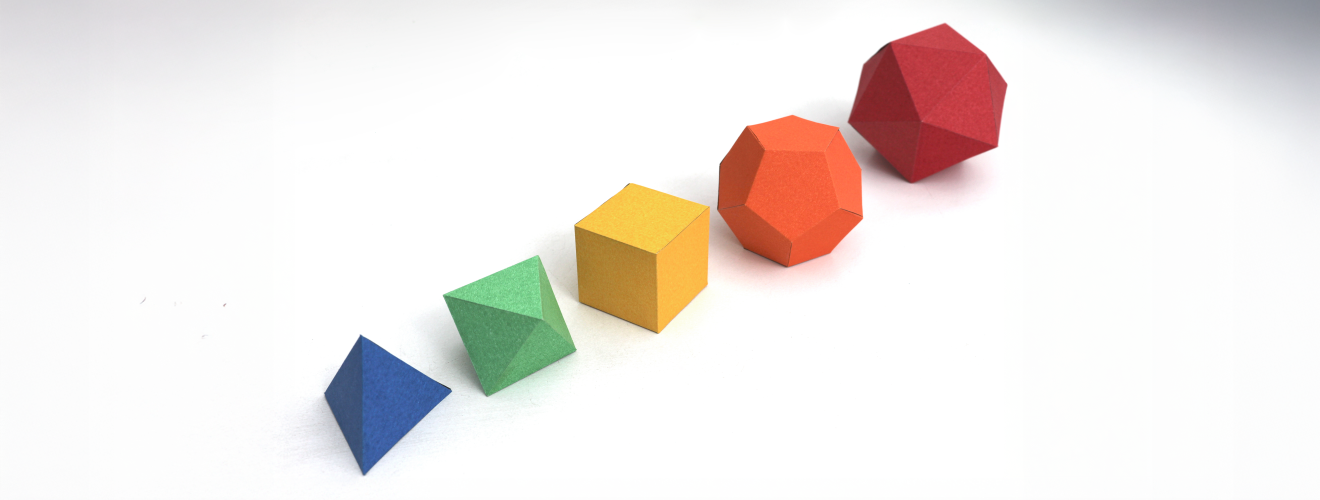
Platonova tijela možemo definirati kao konveksne poliedre čije su sve strane sukladni pravilni poligoni (mnogokuti), a svi su vrhovi jednako udaljeni od središta poliedra.
Ime su dobila po starogrčkom filozofu Platonu (427 – 347 pr. Kr.) iako se prvi put spominju još kod pitagorejaca koji su im davali mistična svojstva i povezivali ih s elementima svemira. Platon je u svojem djelu Timej detaljno opisao njihovu vezu s prirodom i svemirom, prema kojoj je tetraedar povezan s vatrom, heksaedar sa zemljom, oktaedar sa zrakom, ikosaedar s vodom, a dodekaedar s nebom i svemirom. Prema [5] Platonov suvremenik Teetet (417 – 369 pr. Kr.), starogrčki matematičar, prvi je opisao geometrijska svojstva Platonovih tijela zaključivši da ih ne može biti više od pet. No, formalni dokaz nepostojanja više od pet pravilnih konveksnih poliedara dugujemo starogrčkom matematičaru Euklidu (oko 330 – 275. pr. Kr.) koji je Platonovim tijelima posvetio cijeli zadnji svezak svojih Elemenata.
U ovom ćemo članku detaljno opisati simetrije Platonovih tijela i pojasniti njihove veze s grupama permutacija.
1. Platonova tijela
Kao što smo spomenuli, Platonova tijela karakteriziraju činjenice da su im sve strane jednaki pravilni poligoni, a svi vrhovi su jednako udaljeni od središta poliedra. Središte poliedra zamišljamo kao središte sfere koja je poliedru opisana.
Ukratko ćemo navesti osnovne karakteristike Platonovih tijela:
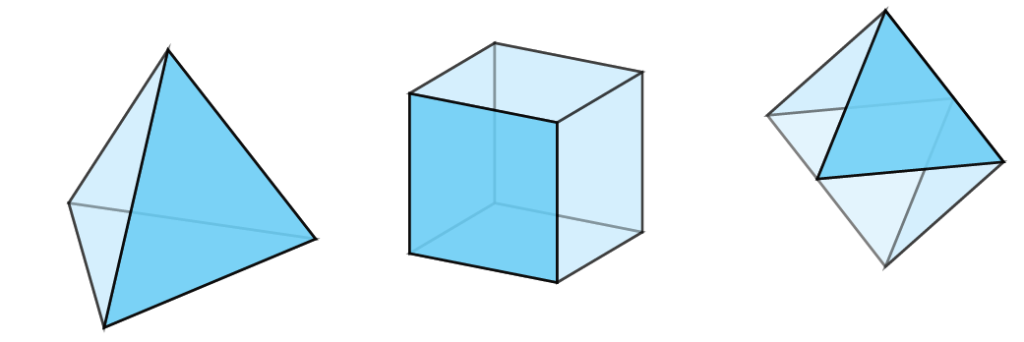
tetraedar – omeđen s 4 sukladna jednakostranična trokuta, ima 4 vrha i 6 bridova
heksaedar – omeđen sa 6 sukladnih kvadrata, ima 8 vrhova i 12 bridova
oktaedar – omeđen s 8 sukladnih jednakostraničnih trokuta, ima 6 vrhova i 12 bridova
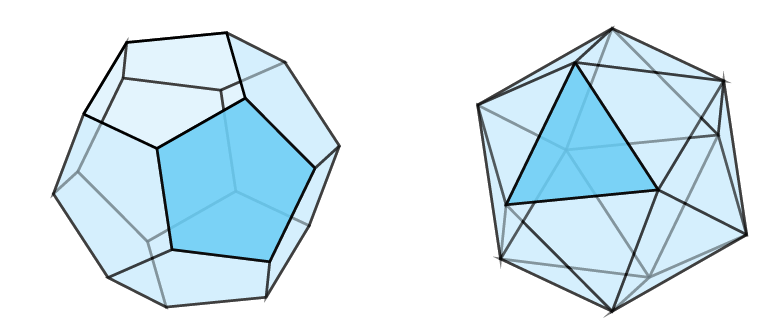
dodekaedar – omeđen s 12 sukladnih pravilnih peterokuta, ima 20 vrhova i 30 bridova
ikosaedar – omeđen s 20 sukladnih jednakostraničnih trokuta, ima 12 vrhova i 30 bridova.
Svakako moramo spomenuti kako za pravilne poliedre vrijedi Eulerova (Leonhard Euler švicarski je matematičar, fizičar i astronom iz 18. st.) formula, $V – B + S = 2$ gdje $V$ označava broj vrhova, $B$ broj bridova, a $S$ broj strana poliedra.
Također je uobičajeno Platonovim tijelima pridružiti tzv. Schläflijeve (Ludwig Schläfli švicarski je matematičar iz 19. st.) simbole, uređene parove brojeva, pri čemu prvi broj označava broj stranica pravilnog poligona kojim je tijelo omeđeno, a drugi broj predstavlja broj bridova koji se spajaju u pojedinom vrhu. U tom su smislu Platonovima tijelima pridruženi sljedeći parovi brojeva: tetraedru $(3,3)$, kocki $(4,3)$, oktaedru $(3,4)$, dodekaedru $(5,3)$ i ikosaedru $(3,5).$
2. Osnovni pojmovi
U ovom ćemo poglavlju ponoviti osnovne matematičke pojmove nužne za razmatranje grupa simetrija Platonovih tijela.
2.1. Grupe permutacija
Kako nam je ideja pojasniti simetrije Platonovih tijela koristeći se permutacijama, ponovit ćemo osnovne definicije grupe i permutacije dane u [2].
Definicija 2.1. Uređeni par $(G, \circ)$, koji čine neprazni skup $G$ i binarna operacija $\circ:G \times G \rightarrow G$ nazivamo grupa ako su ispunjeni sljedeći uvjeti:
(1) binarna operacija je asocijativna, tj. vrijedi $(a\circ b)\circ c = a\circ(b\circ c)$, za svaki $a, b, c \in G$
(2) za binarnu operaciju postoji i jednoznačno je određen neutralni element, tj. $e \in G$ sa svojstvom $e\circ a = a\circ e = a$, za svaki $a \in G$
(3) svaki je element invertibilan, tj. za svaki $a \in G$ postoji i jednoznačno je određen $a^{-1} \in G$ sa svojstvom $a\circ a^{-1}=a^{-1}a=e$.
Ako je dodatno binarna operacija komutativna, tj. vrijedi $a\circ b = b\circ a$, za sve $a, b \in G$, onda kažemo da je grupa $( G, \cdot)$ komutativna ili Abelova.
Važniji primjeri grupa su standardne numeričke grupe, tj. skupovi brojeva uz operacije zbrajanja i množenja. Npr. grupu u odnosu na operaciju zbrajanja čini skup cijelih brojeva $\mathbb{Z}$, kao i skupovi racionalnih $\mathbb{Q}$ i realnih brojeva $\mathbb{R}$. Također, skupovi $\mathbb{Q}\backslash \{0\}$ i $\mathbb{R}\backslash \{0\}$ čine grupu u odnosu na operaciju množenja.
Definicija 2.2. Ako je $H\subset G$ i $(H, \circ )$ također grupa u odnosu na istu operaciju kao i grupa $G$, tada kažemo da je $H$ podgrupa grupe $G$.
Definicija 2.3. Svako bijektivno preslikavanje skupa $S$ na samog sebe zovemo permutacijom na skupu $S$.
Npr. preslikavanje $\left\{ \begin{array}{l} a\to a \\ b \to c \\ c\to b \end{array} \right\}$ je jedna permutacija na skupu $S=\{a,b,c\}$ koju ćemo kratko označavati s $(acb).$
Skup svih permutacija tročlanog skupa $S=\{a,b,c\}$ ima 6 elemenata. To su permutacije $(abc)$, $(acb)$, $(bac)$, $(bca)$, $(cab)$ i $(cba)$.
Nadalje, na skupu $S$ uvodimo operaciju kompozicije koju ćemo pojasniti na primjeru permutacija $(acb)$ i $(cab).$ Svaku od navedenih permutacija prikažemo kao bijekciju skupa $S$ na samog sebe pri čemu kod kompozicije treba voditi računa da prvo djeluje desna permutacija, pa tek onda lijeva. Na taj način dobijemo: $$\left\{ \begin{array}{l} a\to a \\ b \to c \\ c\to b \end{array} \right\}\circ \left\{ \begin{array}{l} a\to c \\ b \to a \\ c\to b \end{array} \right\}=\left\{ \begin{array}{l} a\to b \\ b \to a \\ c\to c \end{array} \right\}$$
Navedenu kompoziciju kratko zapisujemo kao $(acb) \circ (cab) = (bac)$. Dokaz da skup $S$ uz navedenu operaciju tvori grupu ostavljamo čitateljima.
Kada bismo umjesto permutacija tročlanog skupa $S=\{a,b,c\}$ razmatrali permutacije skupa $S_3=\{1,2,3\}$, uz analognu operaciju kompozicije, tada bismo pripadnu grupu permutacija označili sa $\mathbf{S_3}$ i nazivali simetričnom grupom stupnja 3.
S obzirom na to da postoji bijekcija između grupe permutacija skupa $S$ i $\mathbf{S_3}$ koja ujedno čuva operaciju kompozicije permutacija, kažemo da su te dvije grupe izomorfne.
Analogno razmatranju kod tročlanog skupa, skup svih permutacija četveročlanog skupa ${a,b,c,d}$ dan je sa $$\begin{align*}\{(abcd), (abdc), (acbd), (acdb), (adbc), (adcb),\\ (bacd), (badc), (bcad), (bcda), (bdac), (bdca),\\ (cabd), (cadb), (cbad), (cbda), (cdab), (cdba),\\ (dabc), (dacb), (dbac), (dbca), (dcab), (dcba) \}\end{align*} $$ ima 24 elementa i također čini grupu. Navedena grupa je izomorfna simetričnoj grupi stupnja 4, koju označavamo sa $\mathbf{S_4}.$
Kada u nekoj od navedenih permutacija skupa $S$ uočimo da je uobičajeni poredak slova narušen, govorimo o inverziji (npr. permutacija $(adbc)$ ima dvije inverzije jer se slovo $d$ nalazi ispred slova $b$ i ispred slova $c$). Ako iz grupe permutacija izdvojimo samo parne permutacije (permutacije koje imaju paran broj inverzija), dobijemo $$\begin{align*}\{(abcd), (acdb), (adbc), (badc), (bcad), (bdca),\\ (cabd), (cbda), (cdab), (dacb), (dbac), (dcba) \}\end{align*} $$a to je podgrupa grupe svih permutacija skupa $\{a,b,c,d\}$. Dobivena podgrupa je izomorfna podgrupi grupe $\mathbf{S_4}$ koju označavamo s $\mathbf{A_4}$ i zovemo alternirajućom grupom stupnja 4.
2. 2. Simetrije kvadrata
Kao uvod u pojašnjenje simetrija Platonovih tijela (u tri dimenzije) pojasnit ćemo simetrije kvadrata (u dvije dimenzije), pri čemu ćemo uvesti način označavanja iz [3] kojim ćemo se koristiti i u nastavku izlaganja.
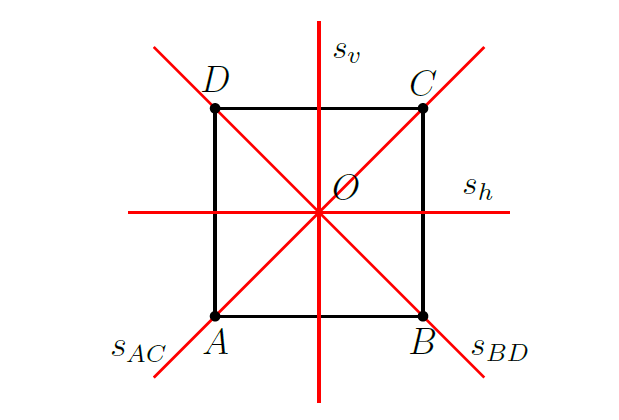
Razmotrimo sva preslikavanja koja preslikavaju kvadrat $\square = ABCD$ na samog sebe. Označimo sa $r_0$, $r_1$, $r_2$, $r_3$ rotacije oko središta kvadrata $O$ u pozitivnom smjeru (obrnuto od kretanja kazaljke na satu) za $0^{\circ}, 90^{\circ}, 180^{\circ}, 270^{\circ}$, redom. Označimo sa $s_h$, $s_v$, $s_{AC}$ i $s_{BD}$ osne simetrije (zrcaljenja) po horizontalnoj i vertikalnoj osi kvadrata te po dijagonalama $AC$ i $BD$, redom. Ovih osam transformacija nazivamo simetrijama kvadrata, a skup koji one čine možemo zapisati kao
$$Sim(\square) = \{ r_0, r_1, r_2, r_3, s_h, s_v, s_{AC}, s_{BD} \}.$$
Navedene simetrije možemo komponirati, a rezultate kompozicija bilo koje dvije simetrije možemo vidjeti u sljedećoj tablici:
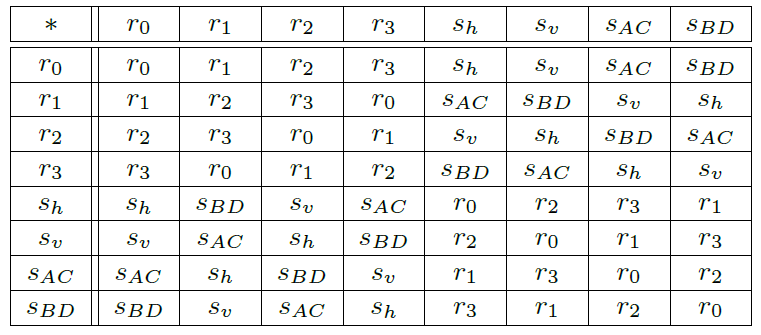
Skup $Sim(\square)$ uz operaciju $\ast$ zadovoljava sve uvjete iz definicije 2.1 te čini nekomutativnu grupu. S druge strane, kada bismo promatrali samo skup rotacija, on bi također činio grupu (komutativnu), koju nazivamo grupom rotacija kvadrata i koja predstavlja podgrupu grupe simetrija kvadrata $Sim(\square).$
Remark 2. 4. Primijetite da bismo koristeći se oznakom iz prethodnog poglavlja svaku od navedenih simetrija kvadrata mogli zapisati s pomoću permutacija, npr. $r_3$, rotaciju kvadrata za $270^{\circ}$, zapisali bismo kao permutaciju $(BCDA)$, a zrcaljenje po vertikalnoj osi $s_v$ kao permutaciju $(BADC).$ Dakle, simetrije kvadrata tvore podgrupu grupe $\mathbf{S_4}$.
3. Grupe simetrija Platonovih tijela
U ovom ćemo poglavlju detaljno pojasniti grupe simetrija pojedinih Platonovih tijela. Simetrije u pravilu dijelimo na rotacije oko pravca u prostoru i zrcaljenja po ravninama u prostoru te njihove kompozicije. S obzirom na to da se sva Platonova tijela mogu upisati u sferu, primijetimo kako osi rotacije, kao i ravnine zrcaljenja, moraju prolaziti kroz središte zamišljene opisane sfere Platonovu tijelu. Također, svaka ravnina zrcaljenja mora raspolavljati Platonovo tijelo.
3. 1. Grupe simetrija tetraedra
Grupu simetrija tetraedra čine 24 simetrije. Možemo ih podijeliti na četiri vrste simetrija: dvije vrste rotacija (ukupno 12 simetrija), jednu vrstu zrcaljenja (6 simetrija) i tzv. neprava zrcaljenja ili roto-zrcaljenja (6 simetrija). U nastavku ih detaljnije pojašnjavamo.
3. 1. 1. Rotacije oko osi koja prolazi jednim vrhom i središtem njemu suprotne stranice
U ovom je slučaju moguće izabrati 4 osi rotacije (po jednu kroz svaki vrh) i oko svake osi rotirati tetraedar za $120^{\circ}$, $240^{\circ}$ i $360^{\circ}.$ No, kako su rotacije za $360^{\circ}$ oko bilo koje od navedenih četiriju osi identične, ukupno razlikujemo 9 različitih rotacija ove vrste. Npr. rotacija oko vrha $D$ za kut $120^{\circ}$ preslika vrhove tetraedra $ABCD$ u vrhove $CABD$.
Navedene rotacije možemo označiti na sljedeći način: $r_{A(120)}$, $r_{A(240)}$, $r_{B(120)}$, $r_{B(240)}$, $r_{C(120)}$, $r_{C(240)}$, $r_{D(120)}$, $r_{D(240)}$ i $r_{0}.$
Permutacije koje odgovaraju navedenim rotacijama su redom $(ADBC)$, $(ACDB)$, $(DBAC)$, $(CBDA)$, $(DACB)$, $(BDCA)$, $(CABD)$, $(BCAD)$, $(ABCD).$
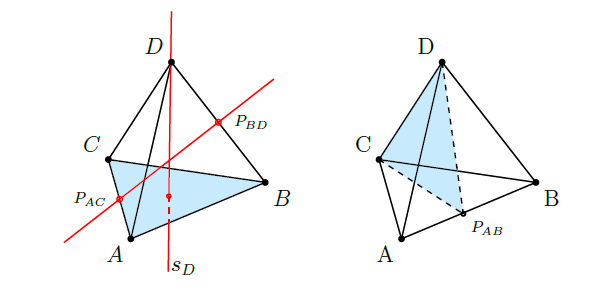
3. 1. 2. Rotacije oko osi koja prolazi polovištima suprotnih bridova
S obzirom na to da imamo tri para suprotnih bridova, moguće je odabrati 3 osi rotacije, pri čemu će jedino rotacija za $180^{\circ}$ oko bilo koje od tih osi preslikati tetraedar na tetraedar. Navedene rotacije možemo označiti s $r_{(P_{AB},P_{CD})}$, $r_{(P_{AC},P_{BD})}$, $r_{(P_{AD},P_{BC})},$ a odgovaraju im permutacije $(BADC)$, $(CDAB)$, $(DCBA).$
3. 1. 3. Zrcaljenja u odnosu na ravnine koje prolaze jednim bridom i polovištem njemu suprotnog brida
U ovom slučaju možemo odabrati bilo koji od 6 bridova, što znači da ćemo dobiti 6 novih simetrija tetraedra. Navedena zrcaljenja možemo označiti s $Z_{ABP_{CD}}$, $Z_{BCP_{DA}}$, $Z_{CAP_{BD}}$, $Z_{ADP_{BC}}$, $Z_{BDP_{AC}}$ i $Z_{CDP_{AB}}$, a njima odgovarajuće permutacije su $(ABDC)$, $(DBCA)$, $(ADCB)$, $(ACBD)$, $(CBAD)$ i $(BACD)$.
3. 1. 4. Roto-zrcaljenja tetraedra
Roto-zrcaljenja su simetrije koje se dobiju kompozicijom rotacija oko osi koja prolazi polovištima suprotnih bridova i zrcaljenjem po ravnini koja prolazi jednim od dvaju “komplementarnih” bridova osi rotacije. S obzirom na to da imamo tri para suprotnih bridova i dva moguća izbora ravnine, dobijemo 6 novih simetrija tetraedra. Permutacije koje odgovaraju roto-zrcaljenjima su $(BCDA)$, $(BDAC)$, $(CADB)$, $(CDBA)$, $(DABC)$ i $(DCAB)$.
Na primjer, roto-zrcaljenje kojem odgovara permutacija $(BCDA)$ i koje vrhove tetraedra $ABCD$ preslikava u vrhove $BCDA$ dobije se kao kompozicija rotacije oko osi koja prolazi polovištima bridova $AD$ i $BC$ i zrcaljenja po ravnini koja prolazi “komplementarnim” bridom $AC$. U prvom koraku nakon rotacije dobijemo tetraedar $DCBA$, a nakon zrcaljenja tetraedar $BCDA$. Da smo nakon rotacije tetraedar zrcalili po ravnini koja prolazi drugim “komplementarnim” bridom, $BD$, dobili bismo tetraedar $DABC.$ Također, tetraedar $BCDA$ mogli smo dobiti i na drugi način, kompozicijom zrcaljenja po ravnini koja prolazi bridom $AC$ i rotacije oko osi koja prolazi polovištima bridova $AB$ i $CD.$ Dakle, roto-zrcaljenja nemaju jedinstvenu dekompoziciju.
Zbrojimo li sve navedene simetrije: 12 rotacija, 6 zrcaljenja i 6 roto-zrcaljenja, dobijemo točno 24 simetrije tetraedra.
Primijetite da se 24 navedene permutacije podudaraju s elementima ranije spomenutog skupa $S.$ Drugim riječima, grupa simetrija tetraedra je izomorfna simetričnoj grupi $\mathbf{S_4}.$
3. 2. Grupa simetrija heksaedra
Grupu simetrija heksaedra (kocke) čini 48 simetrija. Razlikujemo šest različitih vrsta simetrija: tri vrste rotacija, dvije vrste zrcaljenja te roto-zrcaljenja. S obzirom na veliki broj simetrija, nećemo ih pojedinačno označavati i navoditi, nego ćemo svaku vrstu pojasniti na primjeru.
3. 2. 1. Rotacije oko osi koje prolaze središtima suprotnih stranica
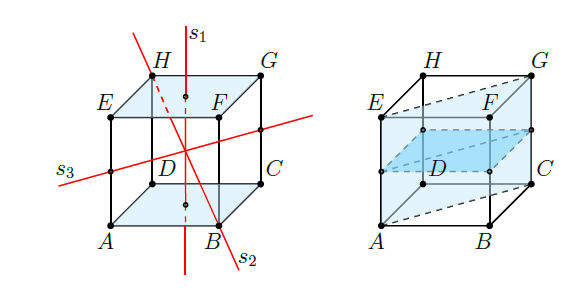
U ovom je slučaju moguće izabrati 3 osi rotacije (po jednu pridruženu paru suprotnih stranica) i oko svake osi (npr. os $s_1$ na slici 5) rotirati heksaedar za $90^{\circ}$, $180^{\circ}$, $270^{\circ}$ i $360^{\circ}$. No, kako su rotacije za $360^{\circ}$ stupnjeva identične, ukupno razlikujemo 10 različitih rotacija ove vrste.
Na primjer, rotacija kocke oko osi koja prolazi središtem stranica $ABCD$ i $EFGH$ za $90^{\circ}$ stupnjeva preslikava kocku $ABCDEFGH$ u kocku $DABCHEFG$. Navedenu simetriju možemo prikazati s pomoću permutacije $(DABCHEFG)$.
3. 2. 2. Rotacije oko osi koje prolaze dijagonalno suprotnim vrhovima
Kako os rotacije prolazi dvama suprotnim vrhovima kocke, razlikujemo 4 različite osi, pri čemu oko svake osi kocku možemo rotirati za $120^{\circ}$ ili $240^{\circ}$ (rotacija za $360^{\circ}$ je identiteta). Na taj način dobijemo 8 različitih rotacija ove vrste.
Na primjer, rotacija kocke oko osi koja prolazi dijagonalno suprotnim vrhovima $B$ i $H$ (os $s_2$ na Slici 5) za kut $120^{\circ},$ kocku $ABCDEFGH$ preslika u kocku $CBFEGADH$ i odgovara joj permutacija $(CBFEGADH)$. Primijetite da u ovom primjeru rotacije jedan ciklus čine vrhovi $A$, $C$ i $F$, a drugi $D$, $E$ i $G.$
3. 2. 3. Rotacije oko osi koje prolaze polovištima suprotnih bridova
S obzirom na to da kocka ima 6 parova suprotnih bridova, razlikujemo 6 različitih osi rotacije. Kocka ostaje “sačuvana” jedino ako je rotiramo oko osi za $180^{\circ}.$ Na primjer, rotaciju kocke oko osi određene polovištima bridova $AE$ i $CG$ ($s_3$ na Slici 5) za $180^{\circ}$ zapisali bismo s pomoću permutacije $(EHGFADCB).$
3. 2. 4. Zrcaljenja u odnosu na ravnine koje prolaze polovištima suprotnih bridova suprotnih stranica
U ovom slučaju razmatramo zrcaljenja u odnosu na ravninu koja “reže” kocku napola. Kako imamo tri para suprotnih stranica, dobijemo 3 nove simetrije kocke.
Na primjer, zrcaljenje po ravnini koja prolazi polovištem bridova $AE$, $BF$, $CG$ i $DH$, kocku $ABCDEFGH$ preslika u kocku $EFGHABCD.$
3. 2. 5. Zrcaljenja u odnosu na ravnine koje prolaze suprotnim bridovima
S obzirom na to da imamo 6 parova dijagonalno suprotnih bridova, razlikujemo 6 novih simetrija kocke.
Na primjer, zrcaljenjem kocke $ABCDEFGH$ u odnosu na ravninu određenu bridovima $AE$ i $CG$, dobijemo kocku $ADCBEHGF.$
3. 2. 6. Roto-zrcaljenja heksaedra
Roto-zrcaljenja se u slučaju heksaedra, kao i kod tetraedra, dobiju kao kompozicije rotacija i zrcaljenja. S obzirom na to da smo spomenuli 24 različite rotacije i 9 vrsta zrcaljenja heksaedra, jasno je kako je broj mogućih kompozicija jako velik (216), no mnoge od njih se ponavljaju, stoga u konačnici razlikujemo 15 roto-zrcaljenja heksaedra različitih od dosad spomenutih simetrija.
Primjer jednog roto-zrcaljenja kompozicija je ranije navedene rotacije oko osi koja prolazi vrhovima $B$ i $H$ za $120^{\circ}$ i zrcaljenja po ravnini koja prolazi suprotnim bridovima $AE$ i $CG$. Nakon rotacije raspored vrhova kocke je $CBEFGADH$, a nakon spomenutog zrcaljenja $CFEBGHDA$.
Konačno, zbrojimo li sve navedene simetrije: 24 rotacije, 9 “pravih” zrcaljenja i 15 “nepravih” zrcaljenja , dobijemo točno 48 simetrija heksaedra.
3. 3. Grupa simetrija oktaedra
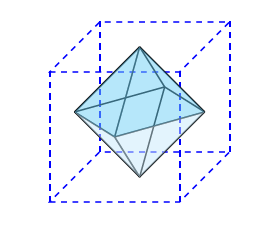
Kako je broj vrhova oktaedra (6) jednak broju strana heksaedra, a broj strana oktaedra (8) jednak broju vrhova heksaedra, spojimo li središte svake od 6 strana heksaedra sa središtima četiriju njoj susjednih strana, dobijemo “kostur” oktaedra.
U tom smislu možemo reći da su heksaedar i oktaedar dualni s obzirom na broj vrhova i strana, pa nećemo u detalje pojašnjavati simetrije oktaedra, nego samo zaključiti kako je grupa simetrija oktaedra izomorfna grupi simetrija heksaedra. Ipak ćemo navesti simetrije oktaedra analogne ranije navedenim simetrijama heksaedra:
(1) 10 rotacija oko osi koje prolaze suprotnim vrhovima
(2) 8 rotacija oko osi koje prolaze središtima suprotnih strana
(3) 6 rotacija oko osi koje prolaze polovištima suprotnih bridova
(4) 3 zrcaljenja po ravninama koje prolaze kroz četiri vrha
(5) 6 zrcaljenja po ravninama koje prolaze kroz dva suprotna vrha i dva polovišta suprotnih vrhovima nesusjednih bridova
(6) 15 roto-zrcaljenja oktaedra.
Zaključno, oktaedar, kao i heksaedar, ima 48 simetrija.
3. 4. Grupe simetrija dodekaedra
Grupu simetrija dodekaedra čini 120 simetrija. Razlikujemo pet različitih vrsta simetrija: tri vrste rotacija, jednu vrstu zrcaljenja te roto-zrcaljenja.
3. 4. 1. Rotacije oko osi koje prolaze središtima suprotnih stranica
U ovom je slučaju moguće izabrati 6 osi rotacije (po jednu pridruženu paru suprotnih peterokuta) i oko svake osi (npr. osi $s_1$ na Slici 7) rotirati dodekaedar za $72^{\circ}$, $144^{\circ}$, $216^{\circ}$, $288^{\circ}$ i $360^{\circ}$. No, kako su rotacije za $360^{\circ}$ stupnjeva identične, ukupno razlikujemo 25 različitih rotacija ove vrste.
3. 4. 2. Rotacije oko osi koje prolaze suprotnim vrhovima
S obzirom na to da dodekaedar ima 10 parova suprotnih vrhova, ima i 10 različitih osi rotacije. Kako oko svake osi (npr. osi $s_2$ na Slici 7) dodekaedar možemo rotirati za $120^{\circ}$ i $240^{\circ}$, razlikujemo 20 rotacija.
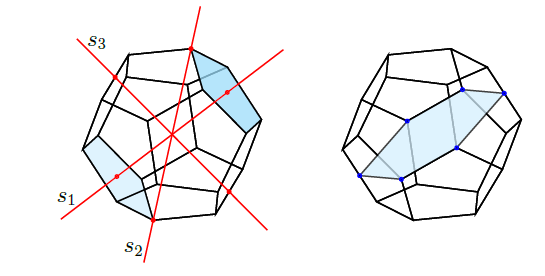
3. 4. 3. Rotacije oko osi koje prolaze polovištima suprotnih bridova
Kako imamo 15 parova suprotnih bridova, a samo rotacije za $180^{\circ}$ oko osi rotacije (npr. osi $s_3$ na slici 7) “čuvaju” dodekaedar, dobijemo 15 novih simetrija.
3. 4. 4. Zrcaljenja po ravninama koje prolaze suprotnim bridovima
S obzirom na to da dodekaedar ima 30 bridova, razlikujemo 15 parova suprotnih bridova, odnosno 15 novih simetrija dodekaedra. Primijetimo da ravnina zrcaljenja prolazi kroz dva suprotna brida i raspolavlja dva para suprotnih stranica dodekaedra.
3. 4. 5. Roto-zrcaljenja
Kao i kod ranije razmatranih Platonovih tijela, roto-zrcaljenja su kompozicije rotacija i zrcaljenja. U slučaju dodekaedra postoji 45 različitih roto-zrcaljenja koja “čuvaju” dodekaedar.
Konačno, zbrojimo li sve navedene simetrije: 60 rotacija, 15 “pravih” zrcaljenja i 45 “nepravih” zrcaljenja , dobijemo točno 120 simetrija dodekaedra.
Vrijedno je spomena da navedenih 60 rotacija dodekaedra čini grupu izomorfnu alternirajućoj grupi $\mathbf{A_{5}}.$
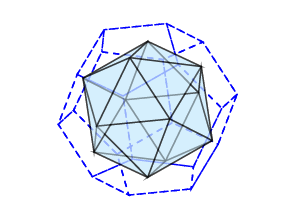
3. 5. Grupa simetrija ikosaedra
Analogan odnos odnosu heksaedra i oktaedra imaju dodekaedar i ikosaedar, tj. grupa simetrija ikosaedra izomorfna je grupi simetrija dodekaedra. Naime, spojimo li središte svake strane dodekaedra sa središtima njoj susjednih strana, dobijemo “kostur” ikosaedra dualnog dodekaedru. Očito je broj vrhova ikosaedra (12) jednak broju strana dodekaedra, a broj strana ikosaedra (20) jednak broju vrhova dodekaedra. U tom smislu, detaljno razmatranje simetrija ikosaedra ostavljamo čitateljima, a zaključujemo da ikosaedar, kao i dodekaedar, ima 120 simetrija.
Literatura
- H. S. M. Coxeter (1973.): Regular Polytopes, 3rd Edition New York Dover
- K. Horvatić (1995.): Linearna algebra I. dio, 8. izdanje MO PMF Sveučilišta u Zagrebu
- A. B. Sossinsky (2010.): Geometries, AMS Student Mathematical Library, vol. 64
- The TikZ and PGF Packages, Manual for Version 3.1.10, dostupno na https://tikz.dev (pristupljeno 2. veljače 2025.)
- W. Waterhouse (1972.): The discovery of regular solids, Arch. Hist. Exact. Sci. 9, 212-221